Abstract
This letter deals with enforcing safety in position-controlled robotic systems. We propose a safety-critical position control framework that enables a robot to safely avoid unsafe reference input positions without compromising the overall tracking performance of the existing controller. Simulation results, as well as experimental results on a quadrupedal robot, validate the practicality of our proposed controller for position-controlled robots. Our proposed approach, which uses the well-known Control Barrier Functions (CBF) framework in a model-free fashion, can serve as a safety filter alongside any model-based or model-free controller.
Our Solution: A Plug-and-Play Safety Filter
Many modern robots rely on position controllers, but these controllers can be inherently unsafe—if you command the robot to go through an obstacle, it will try! Traditional safety methods often require a complex mathematical model of the robot's dynamics, which is difficult to obtain.
We introduce a model-free safety filter that sits between any desired command and the robot's existing controller. It checks if the incoming position command is safe. If it's not (e.g., inside an obstacle), our filter solves a small optimization problem (a QP) to find the closest possible safe position and sends that to the robot instead. This makes any position controller safe without needing to change it.
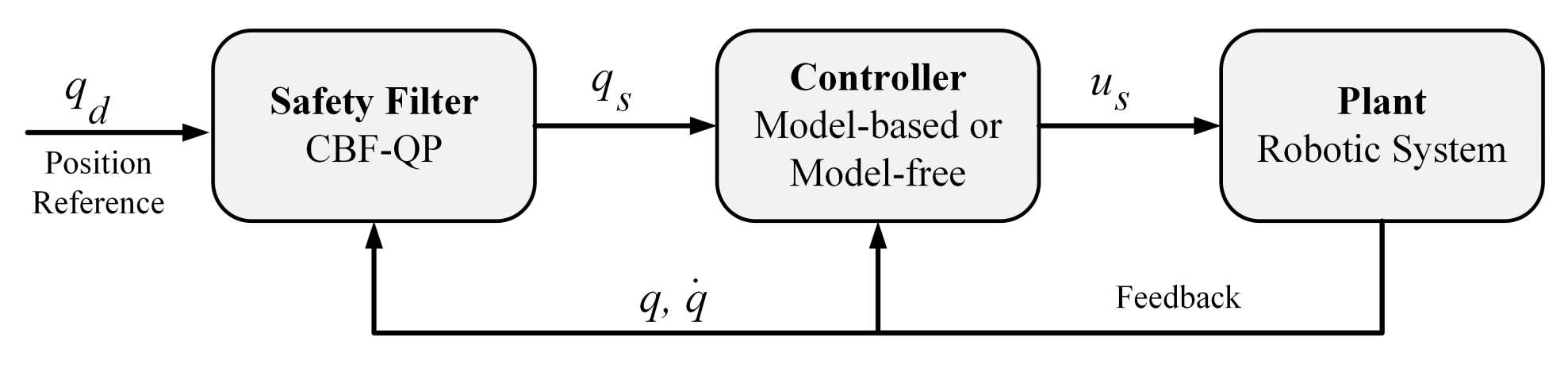
Our safety filter intercepts unsafe position references and passes a corrected, safe position to the robot's controller.
Putting It to the Test
Simulation
We first tested our approach on a simulated double-integrator system. The system was given a reference trajectory (blue line in the video) that passed directly through two obstacles. Our safety filter successfully modified the reference to generate a smooth, collision-free path.
Hardware Experiment
We then deployed the exact same algorithm on a real Unitree Go1 quadrupedal robot. The robot was commanded to walk a straight line through two obstacles. As shown in the video at the top of the page, the safety filter seamlessly guided the robot around the obstacles, demonstrating its practical, real-world effectiveness on complex hardware.
Practical Tuning
A key practical feature of our method is its tuneability. The "cautiousness" of the safety filter can be adjusted with a single hyperparameter, α (alpha).
- A smaller α makes the robot more cautious, keeping a wider safety margin around obstacles.
- A larger α allows the robot to navigate closer to the boundaries of the safe set, resulting in more aggressive but still safe maneuvers.
This allows an operator to easily balance safety margins and path efficiency for different tasks.
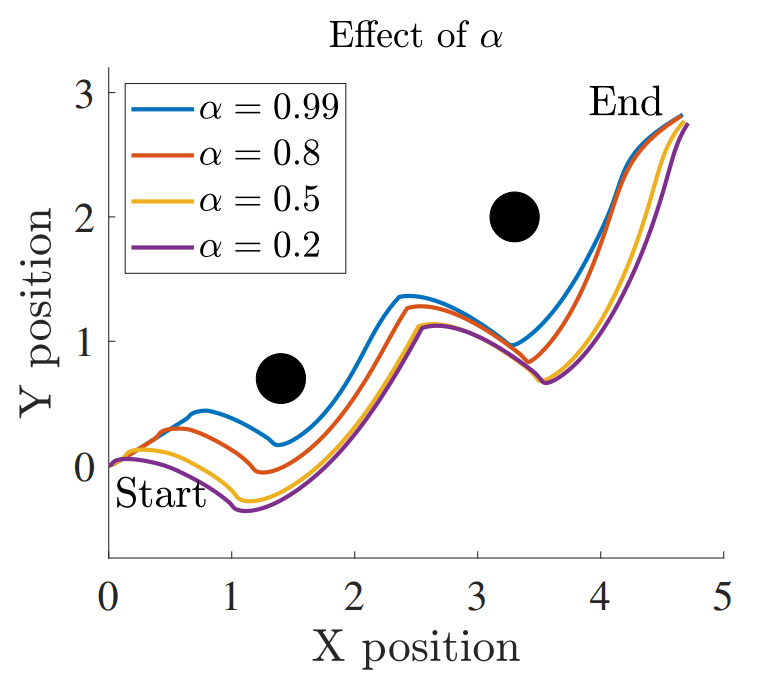
Different paths generated for various values of the safety parameter α.
BibTeX
@inproceedings{sinaei2025safety,
title={Safety-Critical Position Control of Robots: A Model-Free Approach},
author={Sinaei, Kasra and Wu, Hung-Chieh and Ebeigbe, Donald},
booktitle={2025 American Control Conference (ACC)},
pages={2689--2694},
year={2025},
organization={IEEE}
}